
My research focused on making machines and systems more capable of high fidelity and highly “intelligent” performance. By building upon and combing the foundations of system design, control, dynamical systems, machine learning and estimation; I aimed to create systems that automate and solve complex problems.
The primary focus of my research was robot automation, localization and design. This led to development of theory for localization and control in dynamic environments along with the development of robotic systems and their dependent hardware and software.
A complimentary focus of my research has been in autonomous underwater vehicles (AUV) and their docking stations. We have investigated the concept of resident AUVs, optimal design of AUV docking station hardware and optimal control for AUV docking.
Publications
Projects

Autonomous Underwater Vehicle Docking
I have worked on multiple research and design projects with the intent of docking and autonomous underwater vehicle to a power and network source. This has led to custom mechanical electrical and software developments. Click the the link to see more details on the projects..
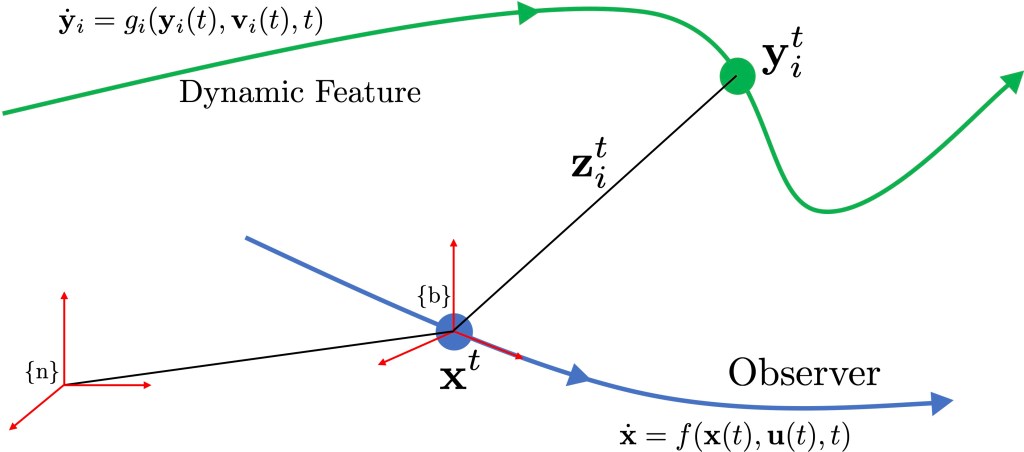
Robot Autonomy
In order for robots to perform ever more complicated task we must enable them with robust autonomy algorithms. I have worked on robot localization in my doctoral research along with model predictive control for a robot docking to a moving platform. Click the link to see more details on the projects.

Robot Testbed with Motion Capture System
I designed and installed a Motion capture environment with position feedback for testing and validation of robot autonomy algorithms. This system captures a volume ~ 14 ft x 14 ft x 8 ft. Click the link to see more details about this project.
Contests

Ocean Observing Prize
The submission made by my team and I was selected as one of 7 winning teams to move on to the next phase of the contest. Click the link to find out more details about this contest.
Micro-g NExT
In Spring 2017 my team and I traveled to the Neutral Buoyancy Lab at Johnson space center to test a tool of our design as part of the Micro-g NExT program. Click the link to see more details and photos.

Marine Energy Collegiate Competition
The submission made by my team and I was selected as the winning business plan and market research report in the 2020 Marine energy Collegiate Competition sponsored by the U.S. Department of Energy (DOE). Click the link to see the press release from the DOE.

NASA Community College Aerospace Scholars
In the spring of 2016 I was afforded the opportunity to participate in the NASA community college aerospace scholars (NCAS) program as a student at Kapiolani Community college. As part of this program I attended the onsite portion at the Jet Propulsion Laboratory in Pasadena, California. This opportunity gave me priceless exposure and networking opportunities as a young student. Click the link to navigate to the NCAS program site.
