Dynamics Learning and Localization (DLL)
One of the main focuses of my doctoral research and the topic of my dissertation focuses on enabling robots to localize in an environment with no static references. To solve this problem I have put forth a theoretical framework called dynamics learning and localization. Publications on this topic will be coming soon.
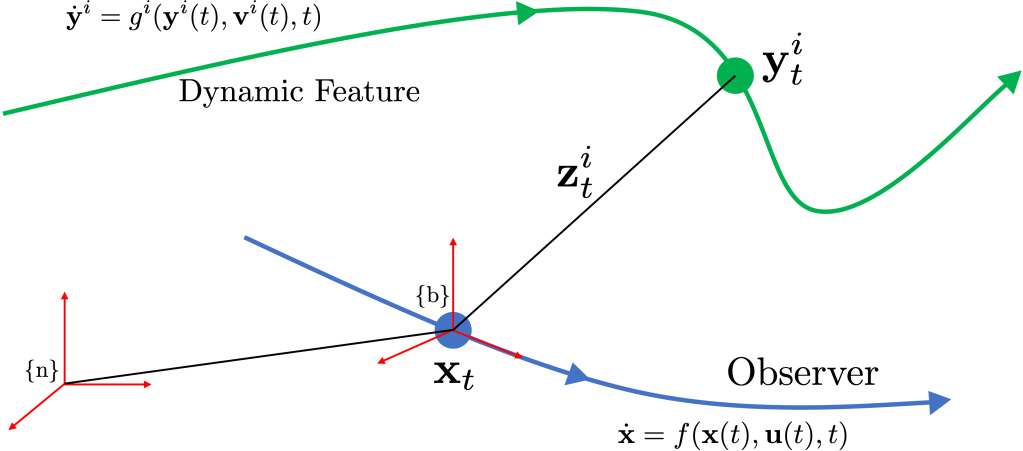
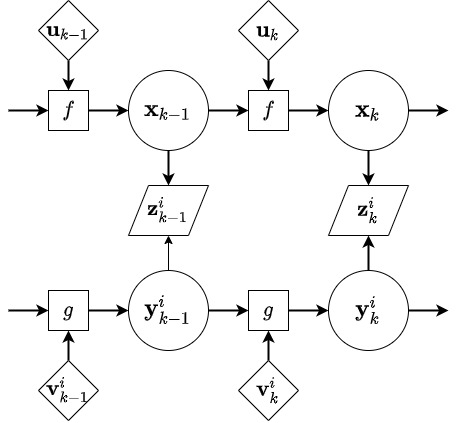
Dynamics learning and localization (DLL) is a proposed concurrent autonomous system state estimation and mapping theory that performs localization using a dynamic feature asa reference while concurrently learning/identifying how the dynamic feature moves. Under the assumptions that a relative state difference measurement between the main system and the feature, the dynamics of the main system, and main system initial conditions are known, this method finds a trajectory estimate of the main system and the feature system while also estimating the dynamics of the feature system.
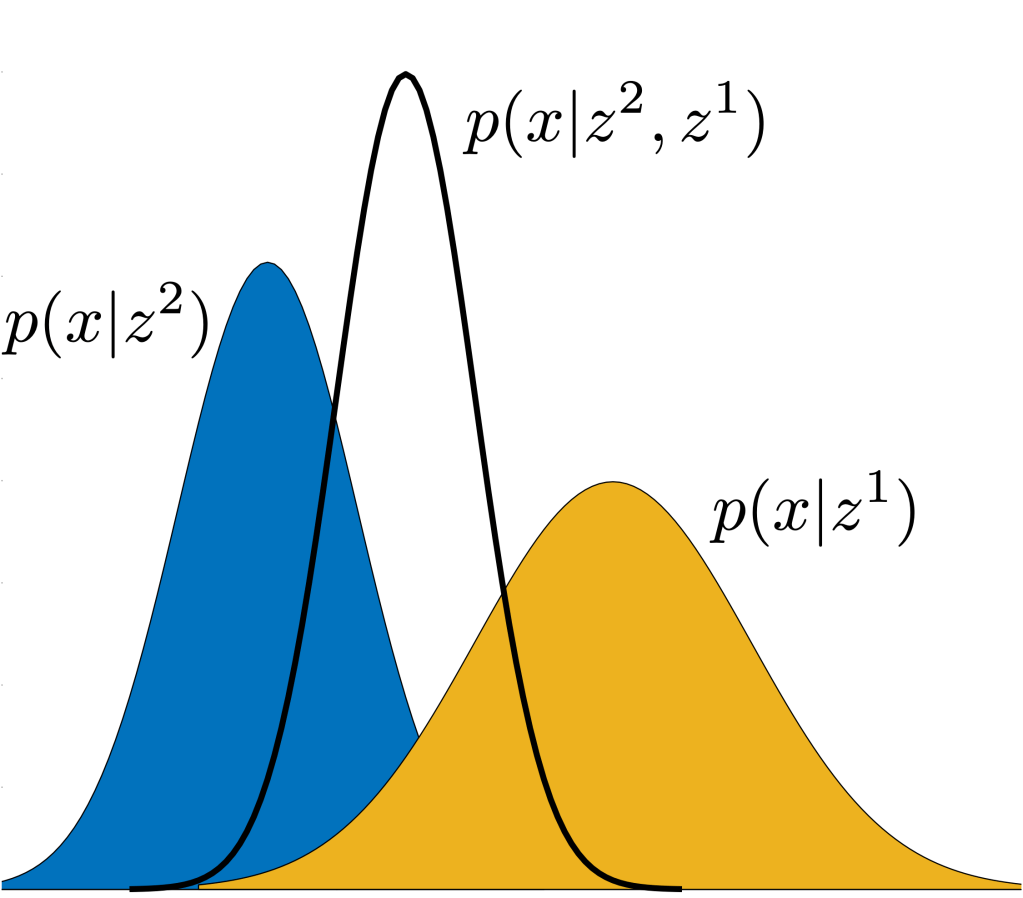
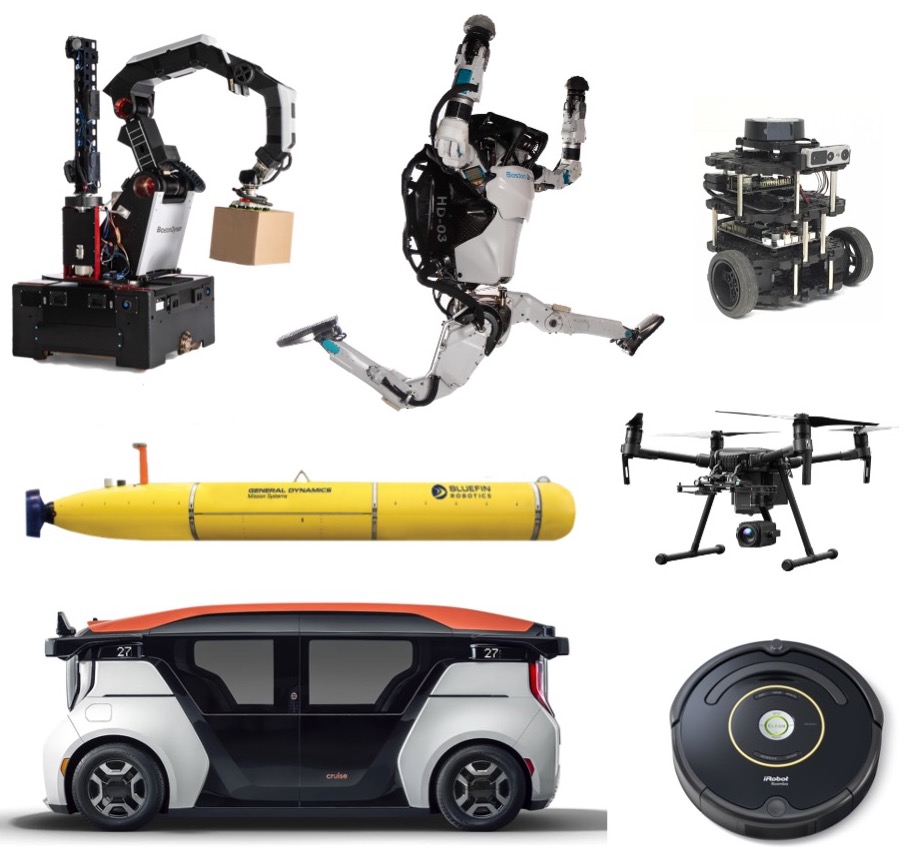
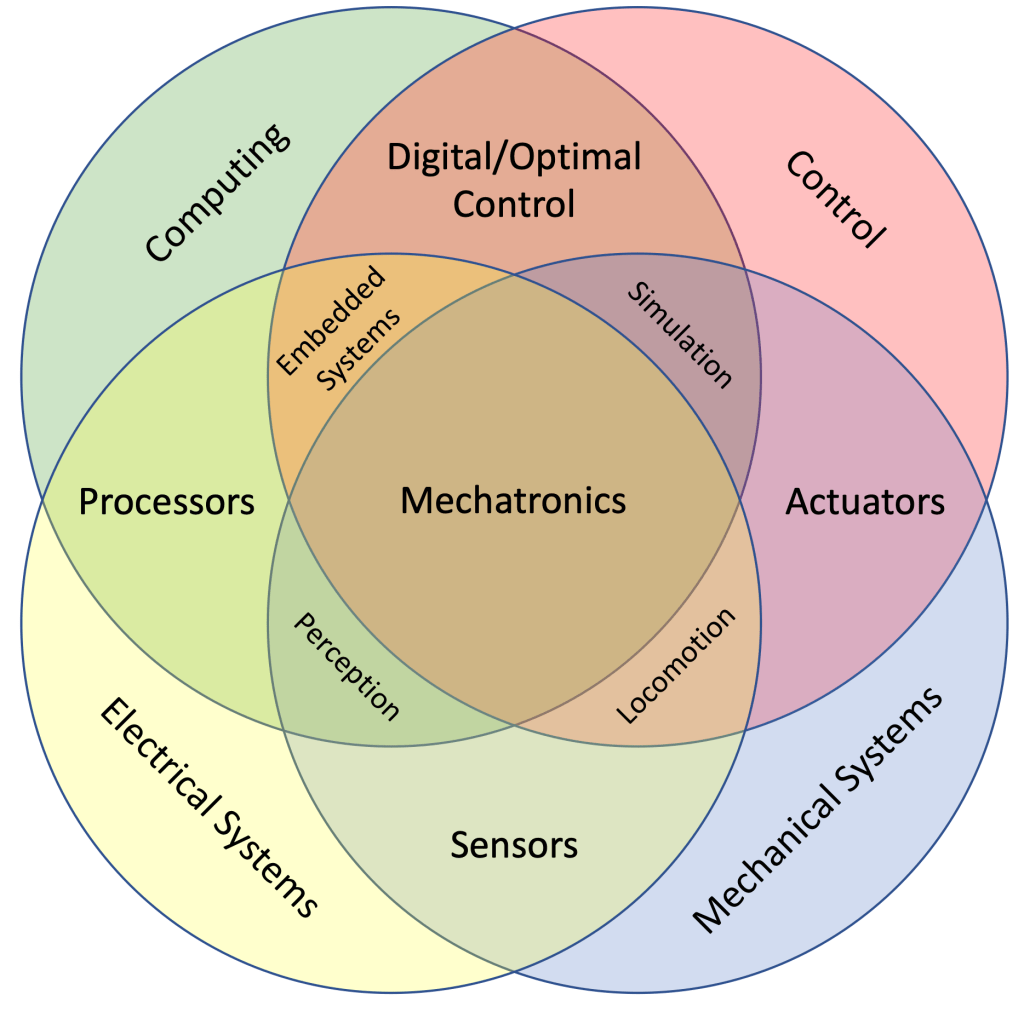
Seen here in images are the visualization of the DLL scenario in continuous and discrete time, the fundamental concept of sensor fusion, examples of robotic systems and the breakdown of mechatronics.
Model Predictive Control (MPC)

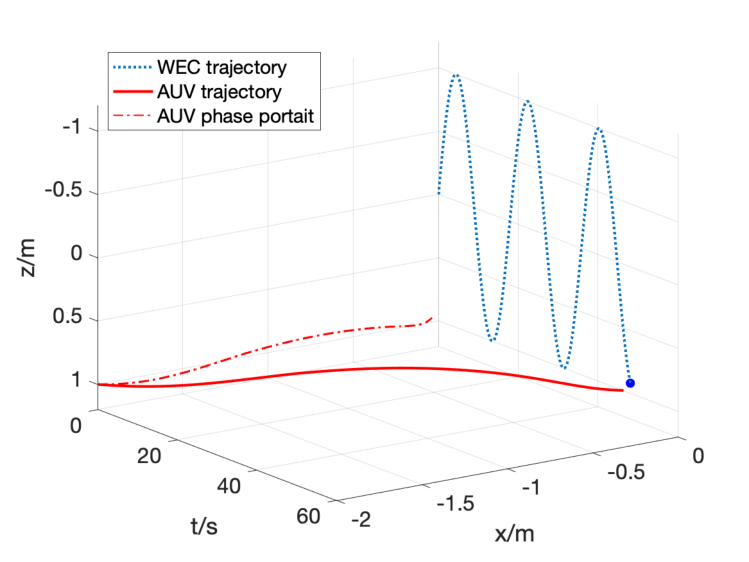
Motivated By my work on docking a robotic system to a moving platform, I began working on a model predictive control solution to enable this dynamic rendezvous problem. A system was developed that included an objective function for the control, the robot dynamics, the platform dynamics and constraints. This was applied to the specific case of an autonomous underwater vehicle (AUV) docking to a floating platform.
Given the goal of docking an AUV into a floating docking station, the vehicle should rendezvous with the latching point in the most “collision-free” manner. The AUV must then navigate itself to where the opening of the docking station will be upon arrival to station. It is assumed that the vehicle is able to measure the relative location of the docking station through onboard sensor. The case without sensing and modeling errors is examined.To calculate the vehicle’s docking trajectory, finite-horizon MPC is adopted. With the knowledge of the hydrodynamic models of the floating station and the AUV, and the relative position of the dock with respect to the vehicle, an optimal docking maneuver can be obtained. Seen in the images are the control trajectory solutions that enable an AUV to dock to a floating platform given different MPC horizons.