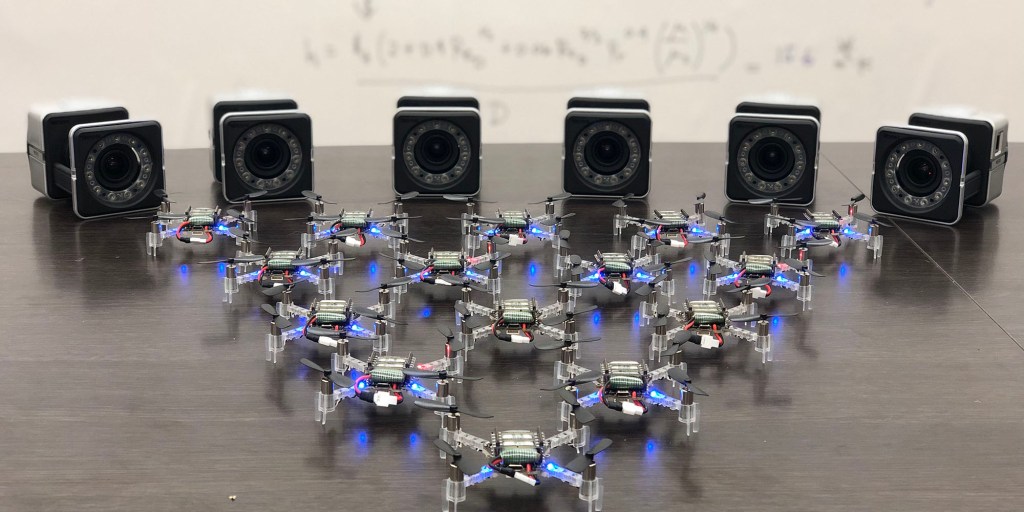
Another effort in my research has been to set up a robot testbed with motion capture ground truth. I designed the structure that supports the motion capture cameras and the drone safety nets. This system is using Vicon Vero cameras along with the Vicon Tracker software that can also feed position data back into the robot system enabling feedback control.
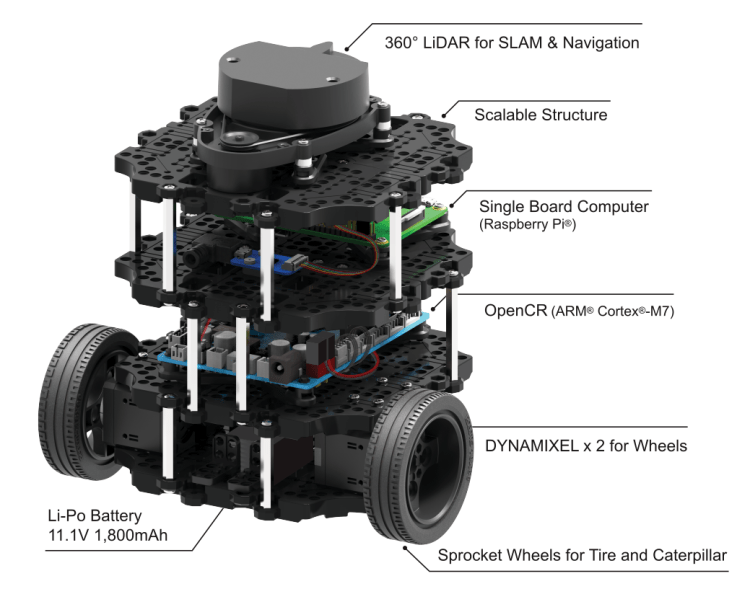
This testbed is in use for research being conducted with Crazyflie drones and Turtlebots as seen in the images. These platforms are being used to test and validate novel robot autonomy algorithms using the motion capture data as validation baseline.