Subsea Autonomous Docking Lander (SADL)

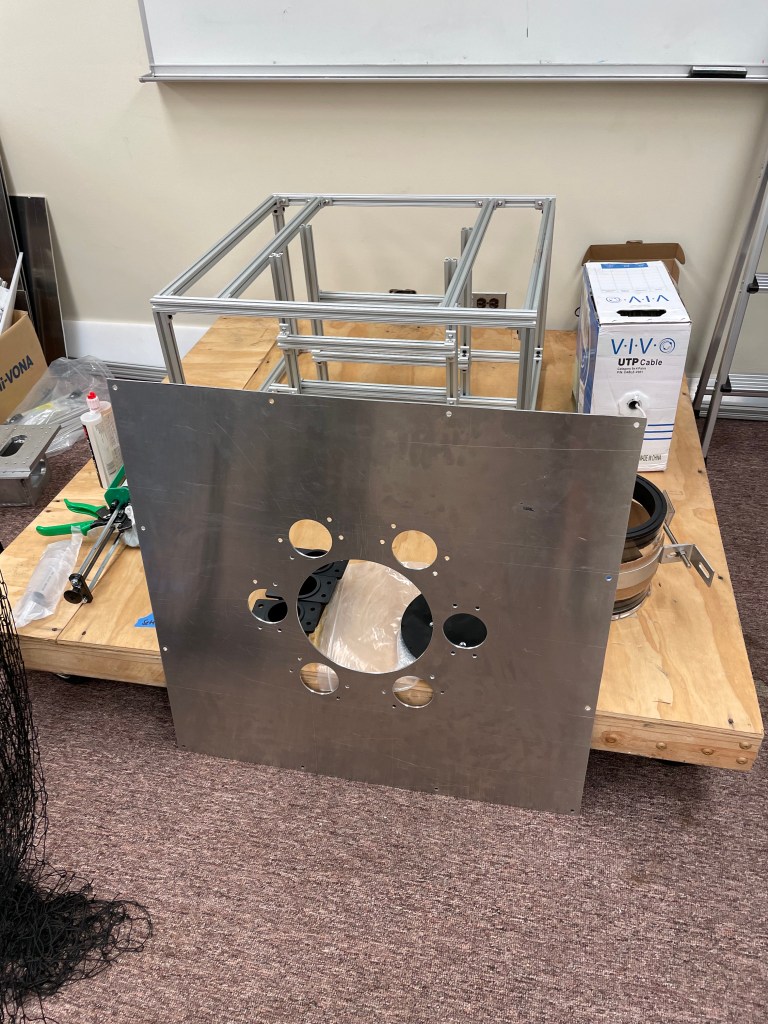
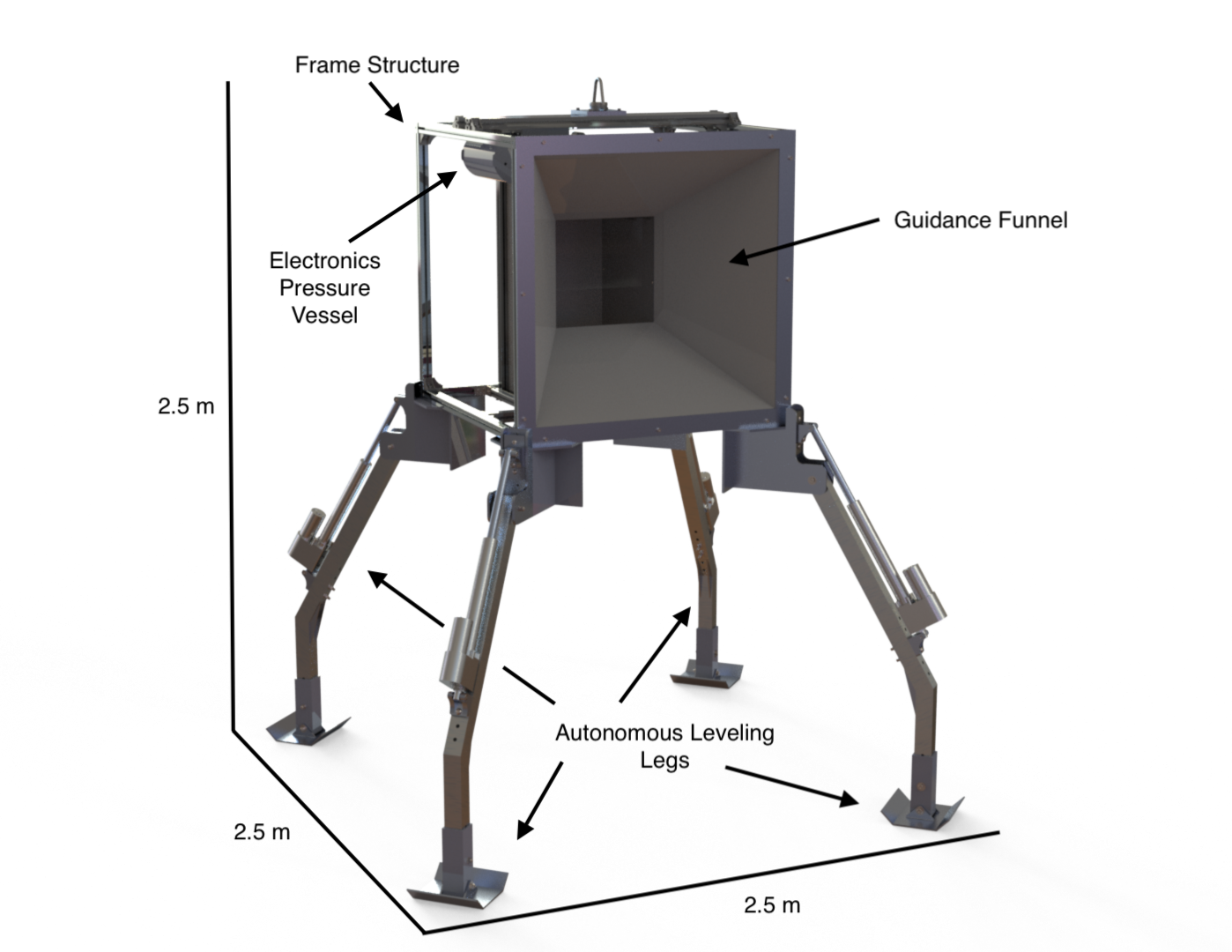
One of my primary research projects while a graduate student at the University of Hawaii has been autonomous underwater vehicle (AUV) docking. A docking station can enable a in situ charging and data transfer for an AUV. The first main effort that led the effort on was the Subsea autonomous docking lander (SADL) which was developed by a group of mechanical engineering students in affiliation with the Robot Autonomy and Navigation Lab at the University of Hawai‘i at Manoa. The design consists of three primary subsystems: a frame built from modifiable t-slot rails, a guidance and securance system, and an autonomous leveling system composed of 4 independent, actuator operated outrigger style legs.
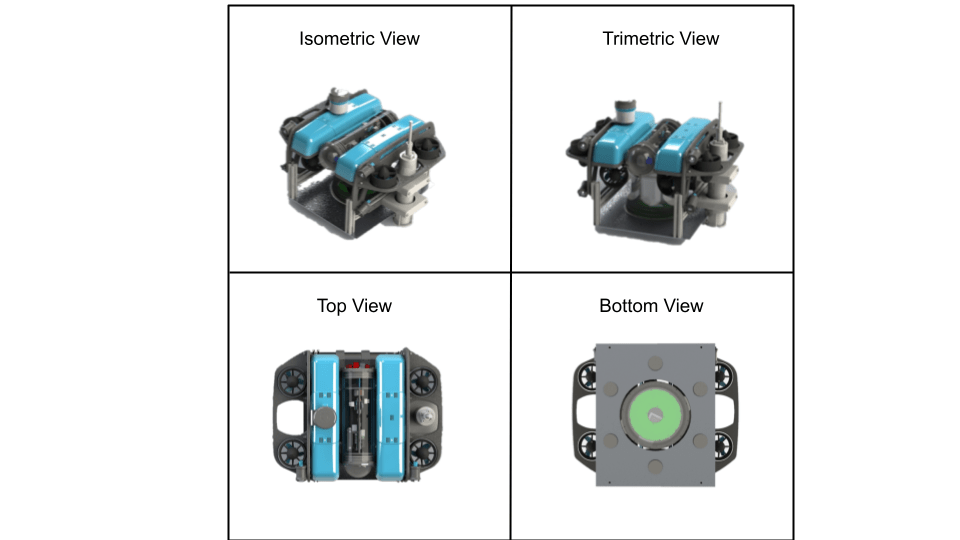
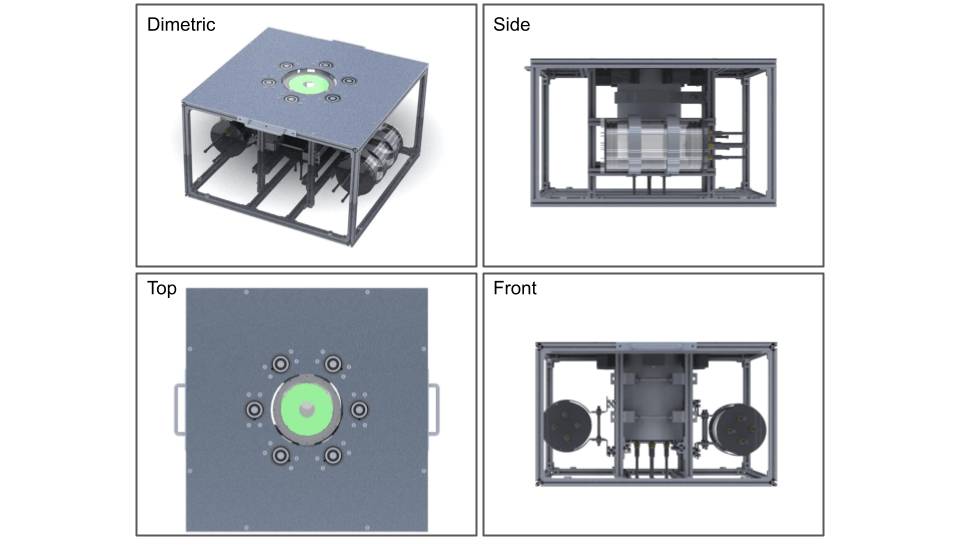
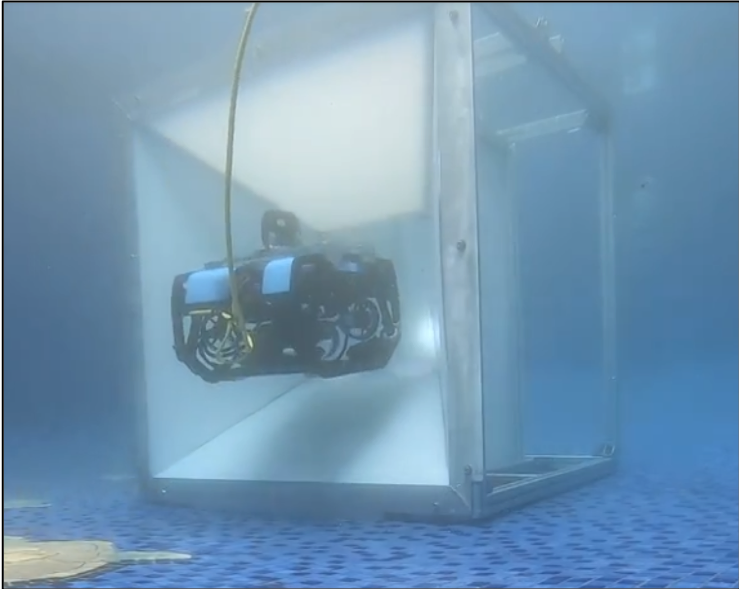
The docking operations begin with the SADL station receiving an underwater vehicle into a funnel-shaped guidance system shown in the images below. The vehicle then enters and ascends the vertical shaft where it is secured into a locked position. As shown in Figure 2, the example vehicle is seen in its docked position. The vehicle then descends the shaft and exits the aft of the station after charging and data transmission.
To be adaptive to operations on an uneven seafloor with grades of up to 30 degrees, the SADL system employs four autonomously controlled lander style legs that level the system. The legs are actuated via 30-cm stroke, 2600-N linear actuators and employ shock absorbing feet in order to reduce dynamic loading on the system.
This first round of testing for the SADL system has been completed in parts; tests of the guidance and locking mechanism, the leveling leg system, and ocean deployment. The guidance and locking mechanisms have been tested by full underwater docking runs with the BlueROV2 in a chlorine pool and in the ocean. The vehicle in these cases was driven into the docking station and locked into place. The leveling leg testing was conducted in a laboratory setting.
Images & Text © 2021 by Jonathan Wallen












Wave Energy Converter Based Docking Station
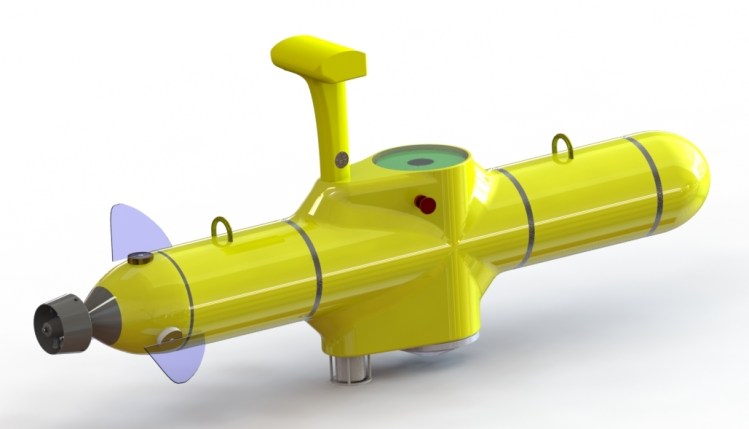
With a group of researchers from the University of Hawaii and Dalhousie University, I developed the design for a novel wave energy converter (WEC), autonomous underwater vehicle (AUV) and and AUV docking station mounted to the WEC. This work was submitted to the U.S. Department of Energy’s Ocean Observing Prize and was selected as one of 7 winning submissions.
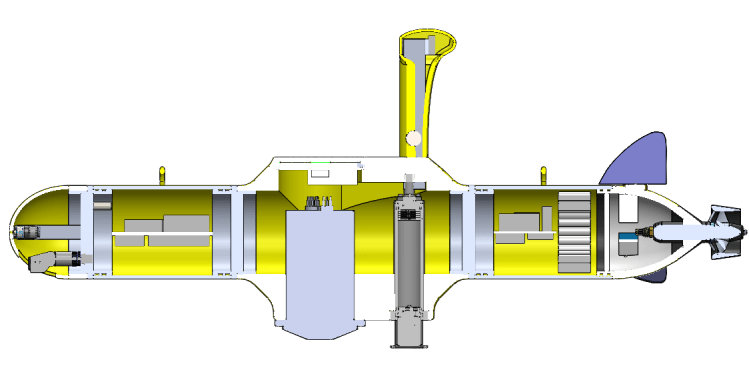
The Hālona system is a mobile wave energy conversion (WEC) platform that targets globally abundant wind waves to provide power to oceanographic sensors and autonomous underwater vehicles (AUV) for scientific survey missions. The system comprises of the WEC itself, an AUV equipped with sensor payloads and a docking station which provides wireless power and data transfer. The Hālona functions as a drifting charging platform with thrusted motion control to improve spatial and temporal resolution along with satellite and GPS connections providing enhanced localization and ground control capabilities.
Images & Text © 2021 by Jonathan Wallen




Kilo Nalu Near Shore Observatory AUV Docking Station Node
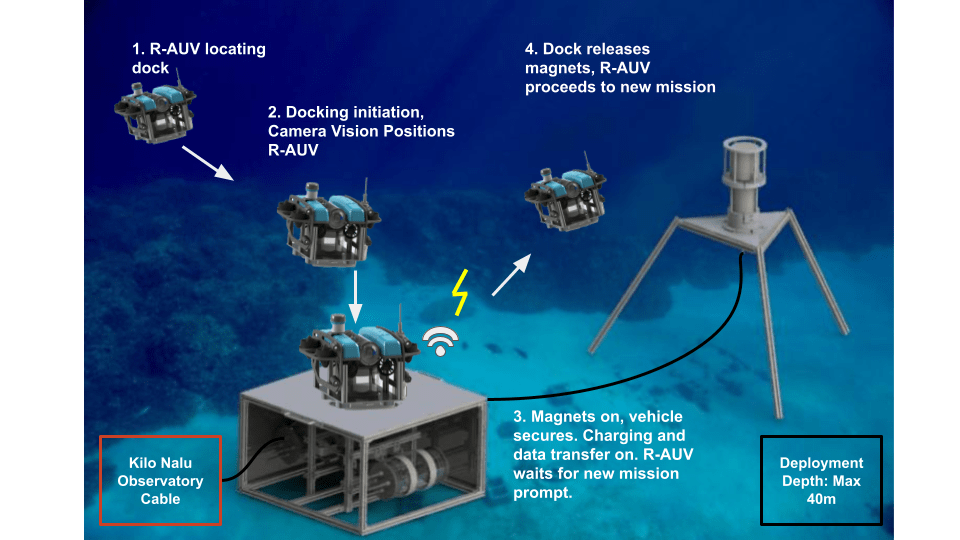
Another project I have led in this effort is the development of a docking station to be installed at a near shore observatory off the south shore of Honolulu, Hawaii. The objective of this project is to develop a shared, open-access AUV testbed, for collaborative marine robots at the Kilo Nalu Observatory (KNO). The long-term vision is to make KNO the first open-water test site for resident autonomous underwater vehicles (RAUVs) to accelerate research and education of related disciplines including oceanography, marine biology, and ocean and coastal engineering at the University of Hawaii. Myself along with colleagues have been developing an intelligent RAUV (an underwater robot that lives in the ocean) and a first-of-its-kind underwater docking station to be deployed at KNO by November 2021 through a research grant from the Department of Energy.
The scope of this project involves (i) the development of autonomy algorithms for vehicle docking and mission planning using robot operating system and Ardusub firmware, (ii) the complete design and implementation of the electronics system incorporating the base BlueROV2 platform, and (iii) the design and fabrication of mechanical system for the docking station as well as the RAUV incorporating the base BlueROV2.
Images & Text © 2021 by Robot Autonomy and Navigation Lab